Interacting with constantly changing environments requires flexible motor control and adaptation. Very little is known about whether and how the sensorimotor system adapts to perturbations which do not just off-set the relation between the sensed error and the required motor correction, but actually revert this relationship. From a control perspective, reversed feedback turns a negative feedback loop into a positive feedback loop. This can create a challenge for accuracy and system stability.
Dr. KUANG Shenbing from Institute of Psychology of Chinese Academy of Sciences examined how human subjects adapt their natural reaching movements under mirror-reversed visual feedback.
They found that even after a few hundred of repetitive exposure trials subjects did not improve their endpoint accuracy, nor did they improve their precision in motor planning. Instead, subjects showed reduced ROC immediately after exposure to reversed vision. The perturbation-independent ROC that we measured occurred only during the late movement. ROC gradually recovered over the course of exposure trials, but failed to re-acquire the baseline levels even after this prolonged exposure. This slow recovery process affected the ROC for early and late movement phases, i.e. independent of hand visibility. This indicates a mechanism independent of visual feedback about hand position. The results suggest that when exposed to reversed visual input, subjects do not adapt their motor planning, but rather their motor control in a way that affects earlier and late phases of the movement selectively. The immediate suppression and slow recovery of ROC under reversed vision revealed a unique form of motor plasticity, which is associated the reversed feedback gain and which is distinct from negative feedback experiments. The results indicate that in situations where gradually and adaptively compensating the feedback perturbation is impossible due to a sign-inversion of the sensorimotor loop, the sensorimotor system employs the strategy of instantaneously reducing the levels of ROC which is then capable of slowly recovering with repeated practice.
This research was supported by the Scientific Foundation of Institute of Psychology, Chinese Academy of Sciences (No.Y3CX112005). The study entitled 'When adaptive control fails: Slow recovery of reduced rapid online control during reaching under reversed vision.' has been published in Vision Research.
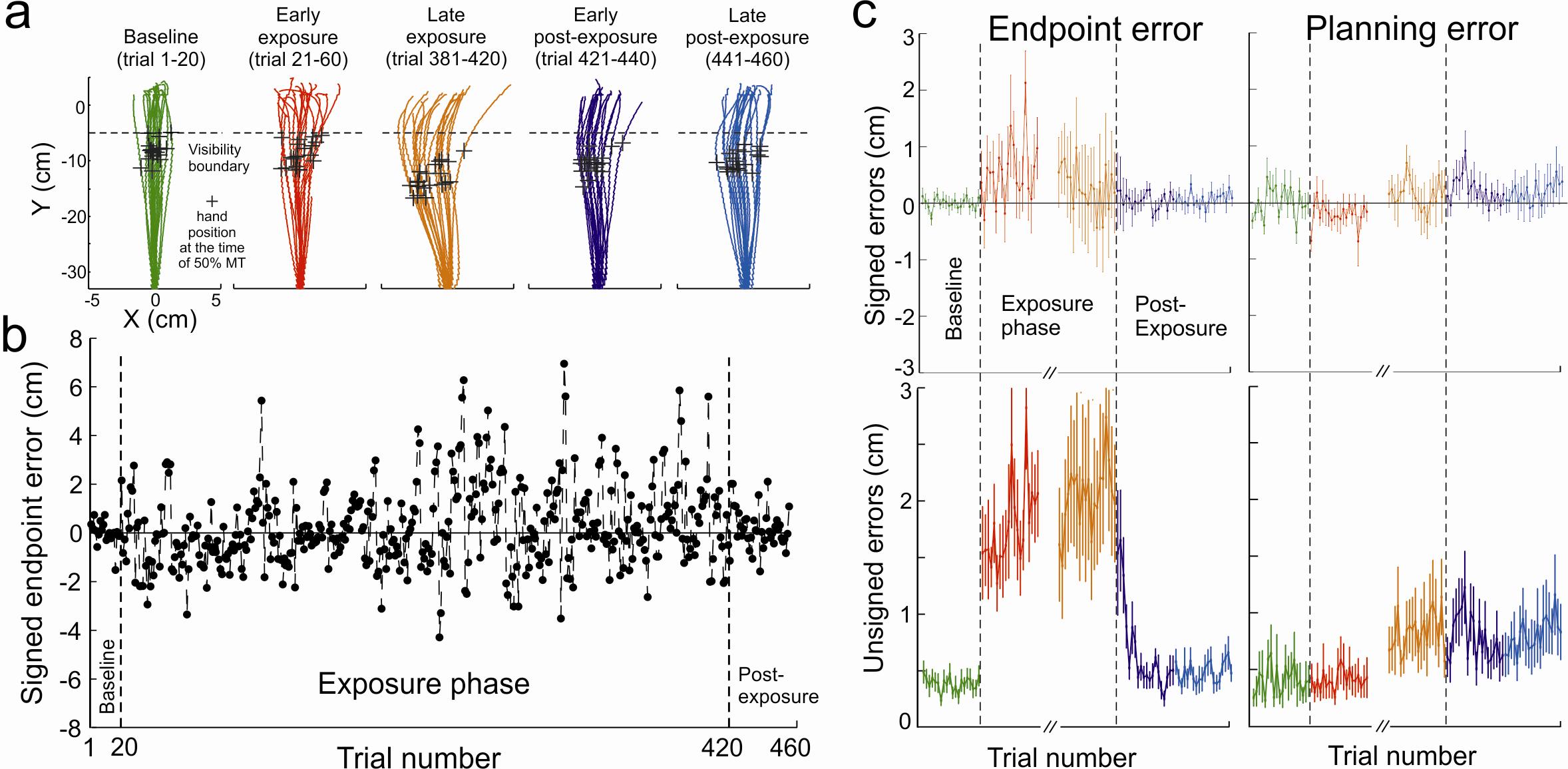
Figure 1: Trial-by-trial reach performance. a: 20 consecutive trajectories of one representative subject. b: The trial-by-trial signed endpoint errors from the same subject. c: The average signed and unsigned endpoint errors and planning errors across subjects.
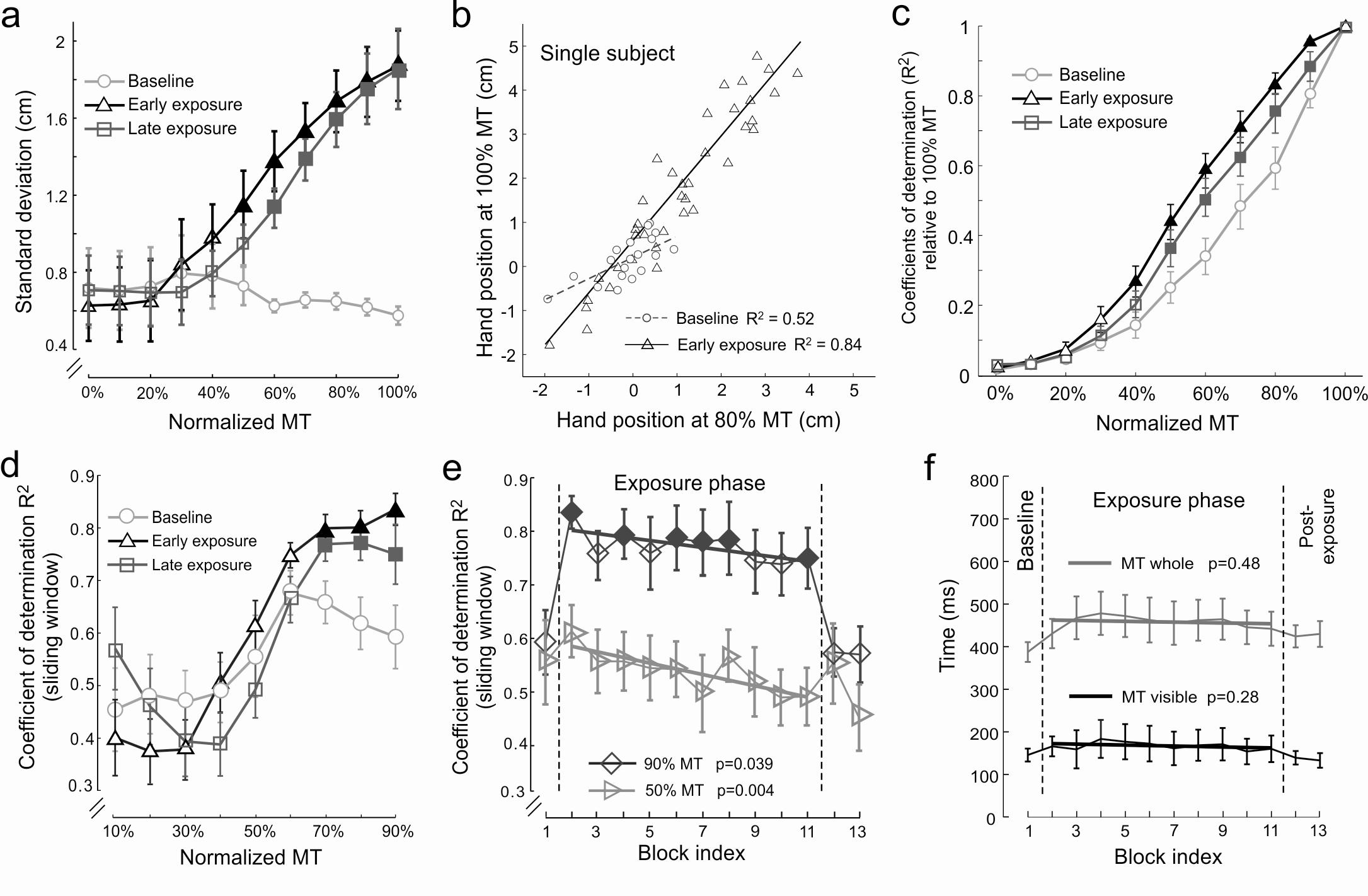
Figure 2: Online control quantification. a: The average horizontal hand variability as a functions of normalized movement time (MT). All error bars denote across-participant SEM. Filled symbols mark points which are significantly different from the baseline level (p<0.05). b: Hand positions at 100% MT relative to hand positions at 80% MT of one subject. c: Mean coefficients of determination (R2) as a function of normalized deciles of movement time in the conventional regression analysis. d: Same as c but for time resolved ROC analysis. e: Evolution of ROC over the experimental phases for the late and the early movement phase. f: Evolution of movement time (MTs) over the experimental phases.

